

It is often useful to be able to synchronize the contents of certain folders. Yesterday I needed a way to make sure that files in separate folders on some of my servers are kept up to date. I wrote the script in this post to help me accomplish that. Incidentally it also proved useful in syncing some private files between dropbox and google drive etc.. 🙂
How does the script work?
The basic idea of the script is to sync files from a source dir to a destination dir. Also, since I work with many large files I only want to copy them if there actually is a difference between the file versions in the source and destination dir. To do all this I came up with these logical steps.
1. Loop through all the files in the source dir.
2. If the file doesn’t exist in the destination dir then copy it.
3. If the file exists in the destination dir then calculate the MD5 hashes of both source and destination files and compare. If the hashes match then the files are identical and can be skipped. If not then copy the file.
The script itself
The comments I put in the code should explain how I built the script according to the logical steps above.
###############################################################################
##script: Sync-Folders.ps1
##
##Description: Syncs/copies contents of one dir to another. Uses MD5
#+ checksums to verify the version of the files and if they
#+ need to be synced.
##Created by: Noam Wajnman
##Creation Date: June 9, 2014
###############################################################################
#FUNCTIONS
function Get-FileMD5 {
Param([string]$file)
$md5 = [System.Security.Cryptography.HashAlgorithm]::Create("MD5")
$IO = New-Object System.IO.FileStream($file, [System.IO.FileMode]::Open)
$StringBuilder = New-Object System.Text.StringBuilder
$md5.ComputeHash($IO) | % { [void] $StringBuilder.Append($_.ToString("x2")) }
$hash = $StringBuilder.ToString()
$IO.Dispose()
return $hash
}
#VARIABLES
$DebugPreference = "continue"
#parameters
$SRC_DIR = 'c:\sourcefolder\'
$DST_DIR = 'C:\destfolder\'
#SCRIPT MAIN
clear
$SourceFiles = GCI -Recurse $SRC_DIR | ? { $_.PSIsContainer -eq $false} #get the files in the source dir.
$SourceFiles | % { # loop through the source dir files
$src = $_.FullName #current source dir file
Write-Debug $src
$dest = $src -replace $SRC_DIR.Replace('\','\\'),$DST_DIR #current destination dir file
if (test-path $dest) { #if file exists in destination folder check MD5 hash
$srcMD5 = Get-FileMD5 -file $src
Write-Debug "Source file hash: $srcMD5"
$destMD5 = Get-FileMD5 -file $dest
Write-Debug "Destination file hash: $destMD5"
if ($srcMD5 -eq $destMD5) { #if the MD5 hashes match then the files are the same
Write-Debug "File hashes match. File already exists in destination folder and will be skipped."
$cpy = $false
}
else { #if the MD5 hashes are different then copy the file and overwrite the older version in the destination dir
$cpy = $true
Write-Debug "File hashes don't match. File will be copied to destination folder."
}
}
else { #if the file doesn't in the destination dir it will be copied.
Write-Debug "File doesn't exist in destination folder and will be copied."
$cpy = $true
}
Write-Debug "Copy is $cpy"
if ($cpy -eq $true) { #copy the file if file version is newer or if it doesn't exist in the destination dir.
Write-Debug "Copying $src to $dest"
if (!(test-path $dest)) {
New-Item -ItemType "File" -Path $dest -Force
}
Copy-Item -Path $src -Destination $dest -Force
}
}
How do I use/run the script?
First of all remember to enter the paths for your source and destination dirs/folders in the #parameters section of the script.
You can run the script manually and synchronize on a need to basis but I recommend using the windows task scheduler to run it regularly and keep your dirs synchronized at all times with minimal effort.
In order to configure a scheduled task which runs the script you can follow the below steps (for windows 2008 R2/windows 7).
1. Start the windows task scheduler.
2. Stand on “task scheduler library” and click “Create Basic Task”.
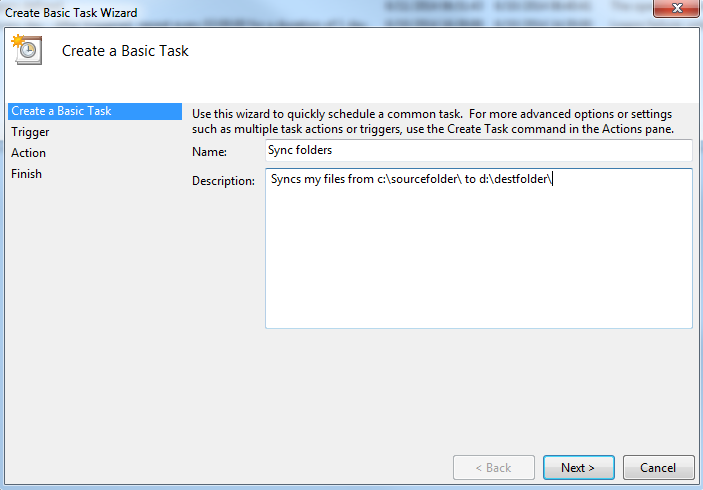
3. Give your task a name and a description.
4. In the next steps choose a schedule for the task and Click “Next” until you get to “action”.
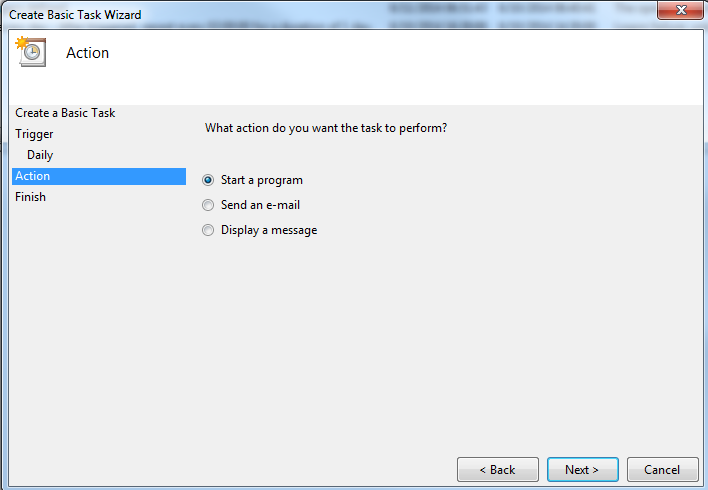
5. Choose “Start a program” and click “Next”.
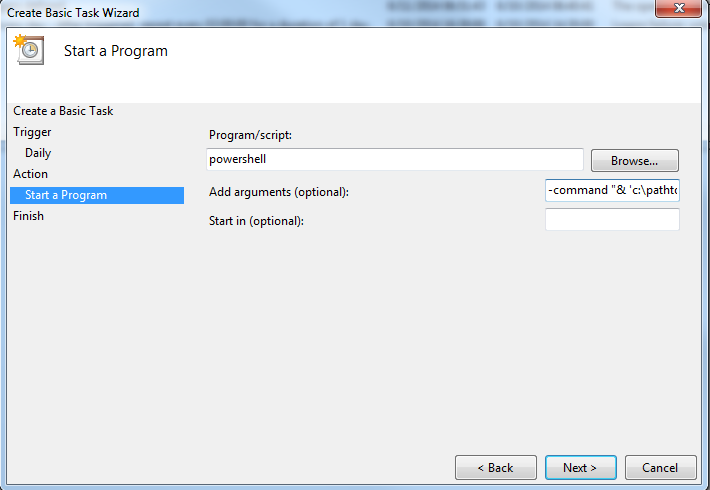
6. Under “Program/script:” simply write powershell. In the “Add arguments:” field write -command “& ‘c:\pathtoscript\sync-folders.ps1′”(change c:\pathtoscript\ to where your sync-folders.ps1 file is located). Click “Next”.
7. You should now see a summary of the task looking sort of like this.
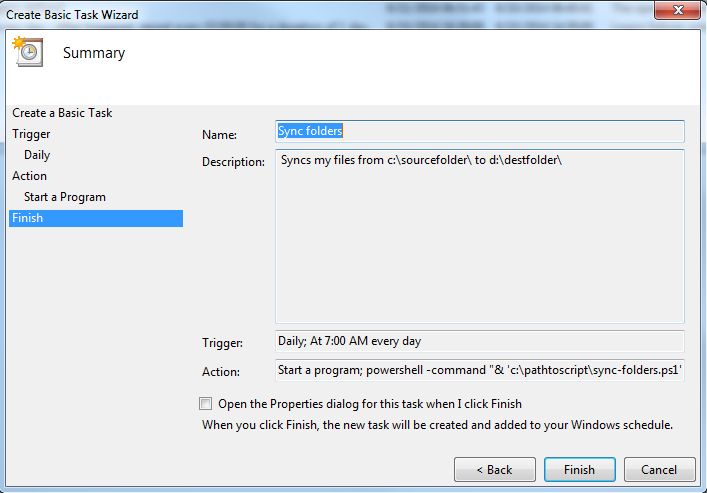
8. Click “Finish”.
That’s it! You’re done.
I hope you find the script useful. Good luck!
